劉玉超 中國指揮與控制學會
為加快指揮控制學科建設(shè)
,構(gòu)建指揮控制人才培養(yǎng)體系
,推進指揮控制系統(tǒng)工程發(fā)展
,將新質(zhì)生產(chǎn)力轉(zhuǎn)化為新質(zhì)戰(zhàn)斗力
,近期再讀了維納的《控制論》(郝季仁譯)和托馬斯·瑞德的《機器崛起》(王曉
、鄭心湖
、王飛躍譯)兩部著作
,學習了戴浩院士在《中國指揮與控制學會通訊》中的主編思語系列文章
,參與了李德毅院士認知物理學思想中關(guān)于機器認知方面的多次討論,引發(fā)了幾點思考。
一
、形而上的科技哲學:賽博(Cybernetics)
指揮控制(Command and Control, C2)的科學起源
,可以追溯到“賽博(Cybernetics)”。“賽博”一詞源自希臘語“Kybernetics”,原意為操縱
、舵手
,也有統(tǒng)治、治理的意思
。維納的賽博控制論為大家所熟知
,他也是控制科學和人工智能行為主義學派的創(chuàng)始人。其實
,“賽博”一詞最早是被法國物理學家安培在《論科學的哲學》(安培去世后1838年和1843年分兩卷出版)中采用
,意思是國務(wù)管理(civil government),可以說屬于社會科學范疇
。
1948年
,維納在著作《Cybernetics:Or Co
ntrol and Communication in the Animal and the Machine》中,把“賽博”擴展到生物和機器領(lǐng)域
,創(chuàng)立了“賽博”的科學思想體系
,“控制”“反饋”“通信交互”是其核心,其創(chuàng)立過程離不開二戰(zhàn)中軍事需求牽引的技術(shù)探索和應(yīng)用研究
,維納的很多創(chuàng)新靈感均來源于此。
1954年
,錢學森在著作《Engineering Cybernetics》(中文譯為《工程控制論》)中
,把“賽博”具象到“機械伺服系統(tǒng)”,形成了完整的控制理論方法
,支撐了控制學科的建設(shè)發(fā)展
,但其研究對象主要是機器,核心是“控制”和“反饋”
。該著作的主要內(nèi)容是“控制理論(co
ntrol theory)”
,但著作標題用的是“Cybernetics”,這造成了人們后續(xù)對“賽博”一詞理解的局限性
。
維納“賽博思想”可以理解為形而上的科技哲學
,蘊含豐富,內(nèi)容磅礴
。維納著作的副標題“或關(guān)于在動物和機器中控制和通信的科學”表明
,“賽博思想”的出發(fā)點是把不同對象(機器和有機體)放在同一概念體系中研究,研究對象是從自然
、社會
、生物、人、工程
、技術(shù)等對象中抽象出來的復(fù)雜系統(tǒng)
。維納“賽博思想”融合了機器操縱控制、組織管理治理
、生物神經(jīng)反饋和信息通信交互等不同領(lǐng)域中信息
、噪聲、反饋
、通信
、控制、穩(wěn)態(tài)
、目的論等概念要素
,并提出了賽博的普遍性、智能性
、非決定性和黑箱方法等四原則
。因此,“賽博”不能簡單翻譯為“控制論”
。
二
、形而下的工程科學:指揮控制(Command and Control)
指揮控制(C2)誕生于二戰(zhàn)后,既是作戰(zhàn)指揮中對系統(tǒng)精確
、快速
、高效運作的需要,也是科學技術(shù)進步在軍事領(lǐng)域運用的產(chǎn)物
,“需求牽引+技術(shù)推動”催生了指揮控制科學與工程的萌芽
。指揮控制的研究對象是包含人、機器在內(nèi)的復(fù)雜系統(tǒng)
,更能體現(xiàn)維納“賽博思想”的本意
。中國指揮與控制學會名譽理事長戴浩院士對指揮控制有一個簡明扼要的定義:“為完成事先指定的任務(wù),綜合運用多種技術(shù)
、資源和一系列信息過程
,對群體性社會事件或活動進行快速協(xié)調(diào)、調(diào)度
、管理或治理”
。軍事作戰(zhàn)、社會治理
、企業(yè)管理等系統(tǒng)運行活動都如此
。
半個多世紀以來,隨著信息技術(shù)的不斷發(fā)展
,在信息化戰(zhàn)爭中逐步建立起完整的指揮控制系統(tǒng)工程方法
,系統(tǒng)的技術(shù)特征也經(jīng)歷了單機結(jié)構(gòu)
、局部聯(lián)網(wǎng)、綜合集成
、一體化設(shè)計;以平臺為中心
、以網(wǎng)絡(luò)為中心、以數(shù)據(jù)為中心
、面向服務(wù)
,以及信息化、智能化
,體現(xiàn)了指揮控制的發(fā)展之路和發(fā)展方向
。
黨的十八大以來,以習近平同志為核心的黨中央堅持科技是第一生產(chǎn)力
、人才是第一資源
、創(chuàng)新是第一動力。學科的持續(xù)發(fā)展需要人才梯隊的支撐
,尤其是在當前復(fù)雜性
、不確定性環(huán)境日益加劇的背景下,對理技融合的復(fù)合型指揮控制人才需求也日益迫切
。加快指揮控制學科建設(shè)和人才培養(yǎng)
,擴大指揮控制科學與工程的普及和推廣迫在眉睫,必須通過學科建設(shè)去引領(lǐng)指揮控制科學與工程的創(chuàng)新發(fā)展
,通過人才培養(yǎng)體系建設(shè)來激發(fā)指揮控制新學術(shù)新觀點新技術(shù)新應(yīng)用的創(chuàng)新活力
。

圖1 “賽博”思想的演化
三、認知的過程模型:指揮控制“OODA環(huán)”
沒有指揮的控制就失去了大腦的方向指引
,沒有控制的指揮就失去了行動的閉環(huán)反饋
,因此,指揮控制也可理解為一個“腦+端”的有機整體
。20世紀70年代,美國空軍上校約翰·博伊德提出的“OODA環(huán)”
,即觀察(Observation)-判斷(Orientation)-決策(Decision)-行動(Action)
,被稱為指揮控制經(jīng)典模型,體現(xiàn)的也是感知
、認知
、行動一體化的閉環(huán)過程。從這個意義上講
,一個人的“感官+大腦+神經(jīng)網(wǎng)絡(luò)+肢體行為”也是一個指揮控制過程
。海灣戰(zhàn)爭后,隨著信息化戰(zhàn)爭的到來
,通信(Communication)
、計算(Computer)、情報(Intelligence)、監(jiān)視(Surveillance)
、偵察(Reconnaissance)等信息技術(shù)賦能要素逐步融入
,甚至融入了殺傷(Kill)的行動效能要素,從C2演變到C4KISR
,指揮控制也成為涵蓋感知
、認知、行動
、保障一體化的體系工程術(shù)語
。
(一)多維度視角理解“OODA環(huán)”
博伊德是上世紀推動美國軍隊改革的幕后力量之一,對近現(xiàn)代西方世界軍事思想有著極為深刻和廣泛的影響
。從空軍飛行員到軍事科學家
,博伊德是一個有個性、特立獨行的學者
,其對孫子
、成吉思汗、毛澤東等東方軍事思想廣泛的涉獵
,對科學
、工程和技術(shù)有深刻的思考,最終在上世紀90年代完善了OODA環(huán)理論
。“OODA環(huán)”是沖突對抗形式化的圖形表達
,描述作戰(zhàn)雙方在時間、物理空間
、認知空間的螺旋發(fā)展與對抗形態(tài)
。
很多人不知道,早在1936年12月
,毛澤東在陜北的抗日紅軍大學做“中國革命戰(zhàn)爭的戰(zhàn)略問題”的演講中
,就提到:指揮員的正確的部署來源于正確的決心,正確的決心來源于正確的判斷
,正確的判斷來源于周到的和必要的偵察
,和對于各種偵察材料的連貫起來的思索。毛主席的描述是目標任務(wù)驅(qū)動逐步引出A
、D
、O、O各環(huán)節(jié)要素
,這也許就是“OODA環(huán)”產(chǎn)生的思維方式
。但是毛主席的這段話卻不能像“OODA環(huán)”一樣快速傳播,這也恰恰說明了“信息”和“知識”之間的差異
,毛主席的知識隱藏在自然語言描述的信息里
,而博伊德用形式化的“OODA”環(huán)表征知識
,使知識得以顯性化、標準化
,可以更好地理解和傳播
。
“OODA環(huán)”反映的是體系綜合能力,四個環(huán)節(jié)演化周期越短
,表明從發(fā)現(xiàn)到處置的響應(yīng)速度越快
。
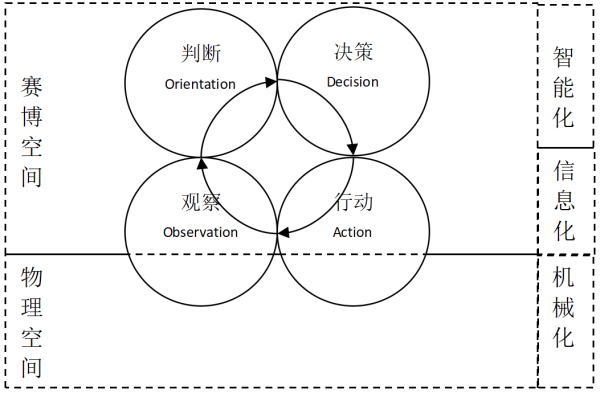
圖2 “OODA環(huán)”示意圖
如圖2所示,我們從空間數(shù)據(jù)流視角看“OODA環(huán)”:今天大家都在說數(shù)字孿生
、信息物理系統(tǒng)(Cyber-Physical Systems
,CPS),空間可以分為物理空間和賽博空間
,“觀察”和“行動”就是兩個空間交界的活動
。物理世界的變化一直在發(fā)生,這些變化可以理解為客觀存在的
、未被感知到的隱性數(shù)據(jù)
。“觀察”就是解決數(shù)據(jù)從隱性到顯性的問題,回答“現(xiàn)實中發(fā)生了什么”
,這是數(shù)據(jù)鏈條的第一環(huán)節(jié);“判斷”也可以叫“態(tài)勢分析”“態(tài)勢研判”
,就是要通過數(shù)據(jù)的處理、融合
,形成態(tài)勢
,這是數(shù)據(jù)到信息的過程,要回答“為什么會發(fā)生
,接下來會怎么樣
,趨勢是什么”;“決策”是從信息到知識,要回答“該怎么辦”
。當前隨著智能技術(shù)的發(fā)展
,我們要充分利用專家經(jīng)驗、機器智能
、群體智能
,從主觀思維決策到智能輔助決策,形成定性定量相結(jié)合的科學的認知決策優(yōu)勢
,這也是錢學森先生提出的“人機結(jié)合的綜合集成研討廳”思想;最后,“行動”就是讓決策知識變?yōu)樾袆又噶?div id="4qifd00" class="flower right">
,成為?yōu)化數(shù)據(jù)
,反饋到物理世界,完成數(shù)據(jù)優(yōu)化的閉環(huán)
。
從機械化
、信息化和智能化的視角看:機械化主要是延伸拓展了人類物理上的觀察和行動能力;信息化是在賽博空間延伸拓展人類對數(shù)據(jù)的計算分析和對工具的自動控制能力;智能化是要延伸拓展我們的認知決策核心能力
。
(二)“OODA環(huán)”詳解
“OODA環(huán)”是博伊德理論思想的濃縮,雖然形式簡潔
,但其蘊含的認知模式機理卻是靈活的
、深奧的。戰(zhàn)爭是不斷演進的社會行為
,博伊德運用不同學科的理論方法交叉研究
,不斷對知識進行反復(fù)更新完善,并將“OODA環(huán)”拓展到科學
、工程和技術(shù)方面
,使之成為一個有機體。相對于封閉的理論模型
,“OODA環(huán)”更是一個開放的認知模型框架
,也正是由于這種開放性,才讓其可以在不同的時期
、不同的領(lǐng)域都得到進化和適應(yīng)
。
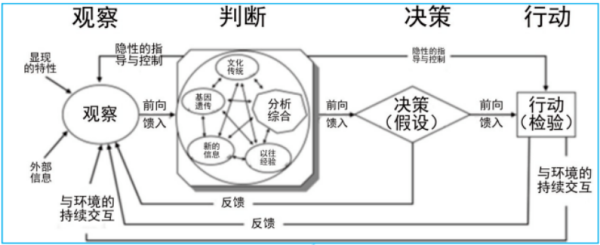
圖3 博伊德 “OODA環(huán)”的形式化
如圖3所示,在“OODA環(huán)”中
,觀察到判斷
、判斷到?jīng)Q策、決策到行動
、行動到觀察
,三個前饋和一個反饋構(gòu)成了循環(huán),最容易理解
。但是
,還有一個前饋和三個反饋:
判斷→行動(Orientation→Action),判斷到行動的前饋
,這是一種隱式指導(dǎo)與控制
。在某些情況下不經(jīng)決策就可直接進入行動。
判斷→觀察(Orientation→Observation)
,判斷到觀察的反饋
。如果判斷有困難,要重回感知
,可能一直陷入循環(huán)
,無法進入下一個環(huán)節(jié),這是先知后覺的體現(xiàn)
。
決策/假設(shè)→觀察(Decision/Hypothesis→Observation)
,決策/假設(shè)到觀察的反饋。如果根據(jù)現(xiàn)有觀察和判斷很難決策
,需要重新觀察
。
與環(huán)境的持續(xù)交互→觀察(Unfolding interaction with environment→Observation)
,環(huán)境交互的信息反饋。
博伊德在“OODA環(huán)”中強調(diào)了三個基本觀點:
(1)沖突博弈雙方互相較量
,看誰更快
、更高質(zhì)量完成“觀察—判斷—決策—行動”的循環(huán)。雙方都從觀察開始
,洞察自己
、洞察環(huán)境和敵人?div id="4qifd00" class="flower right">
;谟^察
,獲取相關(guān)外部信息,判斷感知到的威脅
,及時調(diào)整系統(tǒng)
,做出應(yīng)對的決策,以快吃慢
。
(2)OODA循環(huán)周期由沖突的規(guī)模決定
,空戰(zhàn)常以秒殺,縮短我方“OODA環(huán)”的循環(huán)周期
,延長敵方循環(huán)周期
,切入敵環(huán)內(nèi)部,我快你慢
,通過隱晦
、詭計、奇兵
、機動等手段
,將敵方置于無力合作的孤島,隔絕敵方重心
,制造猜疑
、緊張、摩擦
,控制戰(zhàn)斗節(jié)奏
,最終癱瘓瓦解。雙方的“OODA環(huán)”都隨時間形成螺旋
。
(3)判斷環(huán)節(jié)最為關(guān)鍵
,如果不理解作戰(zhàn)使命,對戰(zhàn)場威脅判斷有誤
,如何達成作戰(zhàn)目標不明確
,或者對于周圍的環(huán)境感知理解有誤,必然做出錯誤決策。
“OODA環(huán)”描述簡潔
,內(nèi)涵豐富,很多學者從不同視角對其進行解讀和研究
,對于軍事研究
,更需要明確聚焦使命任務(wù)。中國指揮與控制學會名譽理事長李德毅院士提出四個方面的理解:
(1)戰(zhàn)爭是一次次的沖突
,多個戰(zhàn)斗離散組合成序列
,成為戰(zhàn)役。關(guān)鍵的一場戰(zhàn)斗很可能就是一場戰(zhàn)役
,關(guān)鍵的一場戰(zhàn)役很可能就是一場戰(zhàn)爭
,無論是戰(zhàn)爭、戰(zhàn)役
、戰(zhàn)斗
,作戰(zhàn)雙方任何規(guī)模的作戰(zhàn)單元,都可以用一個有向的“OODA環(huán)”來形式化表達在時間
、物理空間和認知空間的活動
,所以它有普適性。我們可以解讀為:戰(zhàn)場跨模態(tài)感知
,任務(wù)導(dǎo)向
、態(tài)勢判斷,決心和行動計劃
,機動和軟/硬殺傷
。
(2)判斷是最重要的一個環(huán)節(jié)。未來戰(zhàn)場環(huán)境
,參與作戰(zhàn)的要素越來越多
,根據(jù)作戰(zhàn)使命對戰(zhàn)場態(tài)勢的實時感知和理解變得越來越困難。這個環(huán)節(jié)是指任務(wù)導(dǎo)向
,聚焦態(tài)勢
,判斷威脅,明確距離完成作戰(zhàn)使命的目標還有多少差距
。這是體系作戰(zhàn)中事關(guān)強弱的鏈條
,敵我誰勝誰負,常常就卡在“判斷”環(huán)節(jié)上
。
(3)沖突是敵我雙方一個回合接著一個回合的對決
,加快己方“OODA環(huán)”的形成,在作戰(zhàn)中占據(jù)主動
,切入并阻滯敵方“OODA環(huán)”,使得敵方陷入局部小循環(huán)
、死循環(huán),難以及時行動
。每一個回合都是敵我雙方觀察
、判斷
、決策和行動四個周期組成的環(huán)與環(huán)的對抗,看誰能主動控制戰(zhàn)斗的節(jié)奏
。似乎不應(yīng)該存在環(huán)環(huán)相扣等解讀
。
(4)“OODA環(huán)”可以描述任意作戰(zhàn)單元的循環(huán),但不體現(xiàn)體系作戰(zhàn)情況下各作戰(zhàn)單元之間的層次關(guān)系
、指揮關(guān)系和協(xié)同關(guān)系
,支撐“OODA環(huán)”的網(wǎng)絡(luò)生態(tài)不可或缺;博伊德對不確定性和認知科學有深刻見地,但沒有關(guān)注腦科學和人工智能(AI)發(fā)展的影響
。
(三)C2模型的演進發(fā)展
目前
,國內(nèi)外學者陸續(xù)提出了許多關(guān)于指揮控制過程的參考模型,如基于作戰(zhàn)任務(wù)規(guī)劃的P-OODA模型
、基于蘭徹斯特方程的信息戰(zhàn)簡化擴展OODA模型
、基于AI技術(shù)的OODA模型優(yōu)化框架、Agent化的OODA模型
、基于網(wǎng)絡(luò)對抗的OODA-NetAD模型
、SHOR(Stimulus Hypothesis Option Response)、HEAT(Headquarters Effectiveness Assessment Tool)
、CECA(Critique Explore Compare Adapt)認知模型
,以及我國自主提出的PREA環(huán)(Planning-Readiness-Execution-Assessment)等模型。各類模型的具體分析可參考《2018-2019指揮與控制學科發(fā)展報告》(中國科學技術(shù)出版社
,2020年)
。
四、系統(tǒng)的組織模式:復(fù)雜系統(tǒng)的指揮控制
通常我們說的指揮控制研究
,主要是針對復(fù)雜系統(tǒng)組織的群體行為
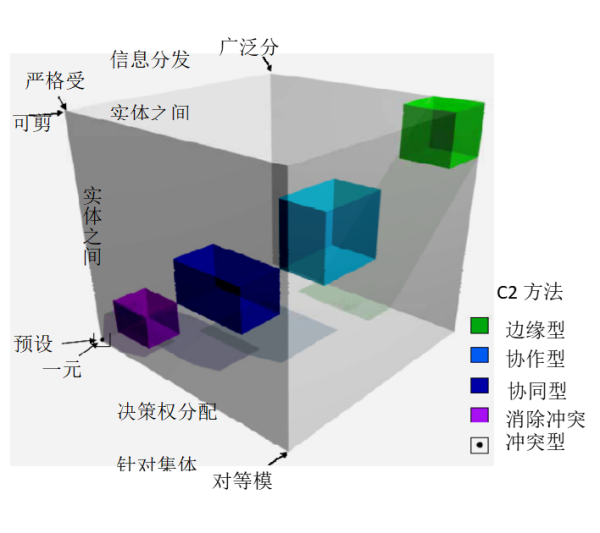
。從組織模式的角度,Davis S.Alberts和Richard E.Hayes同北約研究小組一起提出了C2模式度量的三個維度:決策權(quán)分配
、交互模式
、信息的分發(fā)(如圖4所示)。按照這三個維度能力從集中式到分布式的程度
,將C2分為五個等級
,1級和2級分別是有沖突和消除沖突的C2,3級和4級分別是協(xié)同型和協(xié)作型的C2
,最高級5級是邊緣型(連貫一致的
、扁平的)C2。
圖4 C2模式度量
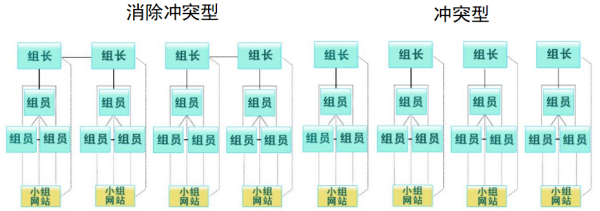
例如:16個人分成4組
,每組1名組長
,3名組員,4人共享1個網(wǎng)站。沖突型任務(wù)分配是固定的
,4個組之間無網(wǎng)絡(luò)
,沒有總負責人;消除沖突型每個組長還被指派了另外一個關(guān)注領(lǐng)域,他可與負責該領(lǐng)域的組長共享信息
。兩個組長之間有點對點的聯(lián)絡(luò)
,通過信息共享來消除沖突(如圖5所示)。
圖5沖突型和消除沖突型組織
如圖6所示
,在協(xié)同型組織中,增加一名協(xié)調(diào)員
,他可與4個組長共享信息
,還有權(quán)訪問所有小組的網(wǎng)站,通過協(xié)調(diào)員與組長以及部分組長之間信息共享來實現(xiàn)協(xié)同;在協(xié)作型的中
,協(xié)調(diào)員關(guān)注所有領(lǐng)域
,各位組長都要關(guān)注其它三個領(lǐng)域問題,他可與其他組長共享信息
,并可訪問所有網(wǎng)站
,此外每組都有2名組員,各指派關(guān)注另外一個領(lǐng)域問題
,并可跨組共享信息
。這樣通過協(xié)調(diào)員、各組組長之間
、各跨組組員之間共享信息實現(xiàn)合作
。
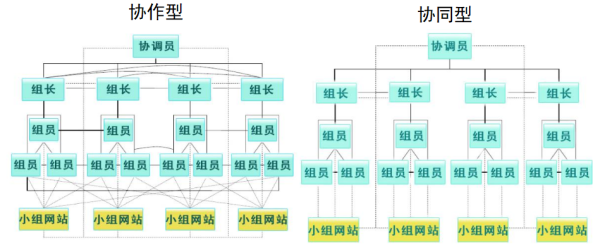
圖6 協(xié)作型和協(xié)同型組織
邊緣型組織由17名個體和4個領(lǐng)域網(wǎng)站構(gòu)成。任務(wù)分配是靈活的
,他們可以分別或共同查明某一領(lǐng)域的問題
。可以與其他所有個體共享信息
,而且可以訪問所有網(wǎng)站
。
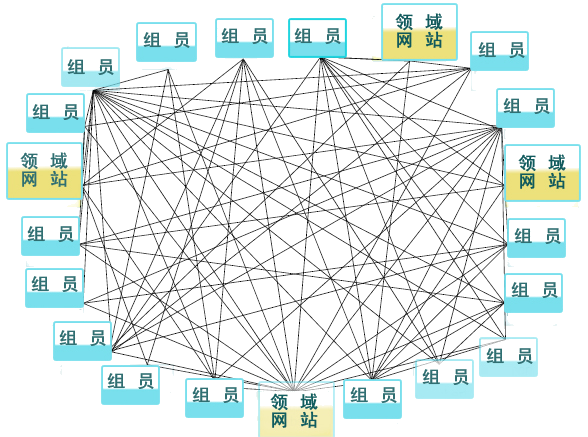
圖7 邊緣型組織
行動中C2的組織模式運用要視具體情況和環(huán)境而定,能夠運用不同的模式
,識別選擇恰當?shù)哪J?div id="m50uktp" class="box-center"> ,必要時轉(zhuǎn)用另一種更合適的模式。有證據(jù)表明
,如果集體達不到所需的最低的成熟度等級
,將不能完成使命。
美國耶魯大學的皮爾洛教授從管理科學的角度將指揮控制組織模式分為類似的五類:全部集中指揮控制
、集中指揮分布執(zhí)行
、協(xié)同指揮控制、分散指揮控制(任務(wù)式)、無組織指揮控制(如表1所示)
。
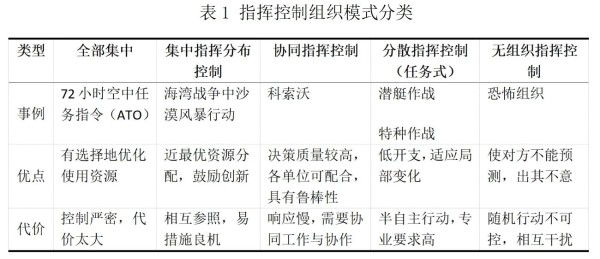
皮爾洛分析對比了每一個指揮控制方法的優(yōu)缺點
,并指出,對于復(fù)雜不確定性系統(tǒng)而言
,更適合分散指揮控制方式
。這種分散指揮控制方式要做到全局信息共享和力量自同步,由全局共享信息引導(dǎo)
,各組織力量無須上級指令就可跟上全局節(jié)奏自主協(xié)同
,基層組織創(chuàng)新性可以得到極大發(fā)揮。過去由于難以實現(xiàn)信息共享
,所以只能由匯聚信息的指揮中心集中控制
,但與此同時,各種不確定性和交互摩擦也被集中起來
,反而造成了更大的不確定性和阻礙
。“去中心化”并不是信息化建設(shè)的初衷,但卻是技術(shù)進步的趨勢
,符合復(fù)雜系統(tǒng)不確定性規(guī)律
,只有最清楚實際情況的人才能做出正確的決策。華為創(chuàng)始人任正非先生提出
,未來的戰(zhàn)爭是“班長的戰(zhàn)爭”
,由沖在一線的人決定勝負,管理人員要當好“少將連長”
,既要有全局
,又要在一線。在當今的管理思維中
,“云端賦能
、力量到邊”的理念越來越清晰,自上而下的指揮管理體系向賦能體系轉(zhuǎn)變
,將云端聚集的系統(tǒng)能力服務(wù)化
,為一線、為邊緣
、為端賦能
,力量下沉。
在社會治理領(lǐng)域也是如此
,根本上是要解決好社會
、政府、市場之間的和諧關(guān)系
,建立需求側(cè)
、供給側(cè)
、平臺側(cè)的生態(tài)圈體系工程(如圖8所示)。社會治理是黨建引領(lǐng)下“管理+自治”
,“管理”要成為自上而下的賦能體系
,注重統(tǒng)一規(guī)劃、智能決策
、精準賦能
,實現(xiàn)力量到邊的效果;“自治”要成為自下而上的聚能體系,注重智能物聯(lián)
、平臺交互
、群體聚能,達到力量無邊的效果;“+”就是要通過共建
、共享
、共治的社會治理平臺,打通管理賦能生態(tài)圈和自治聚能生態(tài)圈
,滿足人民美好生活需要,推動社會治理現(xiàn)代化
,同時又支撐市場服務(wù)的模式創(chuàng)新
,也就是建立優(yōu)政、惠民
、興業(yè)的和諧三角關(guān)系
,從場景、技術(shù)
、標準和模式等四個方面
,構(gòu)建指揮調(diào)度能力和服務(wù)運營能力兩大能力體系。
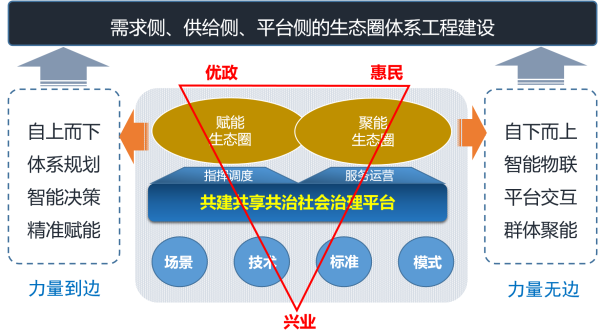
圖8 構(gòu)建社會治理“兩圈一平臺”
五
、人機結(jié)合之路:智能指揮控制
上世紀九十年代
,面對開放復(fù)雜系統(tǒng)問題,錢學森先生就創(chuàng)立了“綜合集成研討廳”思想
,提出人機結(jié)合
,把古今中外千億人的頭腦組織成一個偉大的思維體系——大成智慧工程(me
ta Synthetic Engineering)!今天隨著人工智能技術(shù)飛速發(fā)展,大成智慧工程已經(jīng)初具雛形
。
(一)智能時代到來
近年來
,以“大數(shù)據(jù)、大算力
、大模型”為特征的生成式AI技術(shù)的發(fā)展日新月異
,不僅是很多藍領(lǐng)的體力工作,即使白領(lǐng)的腦力工作也不再神秘
,可以被機器替代
。工業(yè)時代
,泰勒發(fā)明計時秒表,實現(xiàn)了對體力工作的標準化科學管理
,同時也產(chǎn)生了管理階層
,也就是德魯克定義的知識型工作。今天
,AI的內(nèi)容生成創(chuàng)作已經(jīng)可以實現(xiàn)寫郵件
、演講稿、文案
、報告
、代碼開發(fā)、藝術(shù)創(chuàng)作等等
,“想象力
、創(chuàng)造力”一直是人類高級知識工作者引以為傲的稀缺資源,而如今白領(lǐng)的知識型管理工作也不再深不可測
,步入“知識生產(chǎn)線”時代!
很多人說“未來是人工智能的時代”
,這個說法并不準確,應(yīng)該是“人機混合智能的時代”
。李德毅院士提出
,人工智能是人類智能的體外延伸,人類正是因為發(fā)明了各種各樣的工具
、動力機器和智能機器
,才獲得了對物質(zhì)世界的充分支配權(quán)。未來人類文明的發(fā)展
,就是要讓人發(fā)揮人的智慧
,機器發(fā)揮機器的智能,用碳基生命的智慧引導(dǎo)硅基機器的智能
,不會讓它算計人類
。計算機之父阿蘭·圖靈在“計算機械和智能”一文中說,“我既不貶低不能在選美競賽中有出色表現(xiàn)的機器
,也不貶低同飛機賽跑失敗的人”
。古代先哲、物理學開山鼻祖亞里士多德曾經(jīng)說過
,奴隸是“有生命的工具”;2500年后的今天
,人類努力創(chuàng)造的智能機器是“非生命的奴隸(助理)”,這正是生命的尊嚴所在
,更是人類的智慧所在
。
智能時代,機器可模擬人類能工巧匠的智能
,一專多能或多專多能
,也可彌補人在疲勞過度
、情緒失控下的智能缺失,還可協(xié)同人類探索未知問題
,相互啟迪
,迭代積累,以潤物細無聲的柔軟
,把人類從繁雜的體力
、智力勞動中解放出來,從事更有創(chuàng)造力的工作
。人類創(chuàng)造的智能機器融入環(huán)境
,反過來促進人類智能的發(fā)展,輔佐人類創(chuàng)造
。人工智能成為人類智能發(fā)展的新生態(tài)
,通過人類智能和人工智能的融合迭代,“智能”將以超自然進化的速度進化發(fā)展
。
(二)AI賦能C2的優(yōu)勢與局限
在指揮控制領(lǐng)域
,隨著情報、監(jiān)視
、偵察(ISR)感知手段的加強
,情報大數(shù)據(jù)指數(shù)級增長,但數(shù)據(jù)的增長速度和規(guī)模并沒有為情報分析工作帶來相匹配的改善
。相反,信息量越來越大
,消耗的資源越來越多
,信息的繁雜干擾反而讓我們可能做出更差或者不正確的決策。情報大數(shù)據(jù)的價值判斷需要看其在生成感知態(tài)勢方面的作用
,以及通過在正確的時間以正確格式提供給正確的人或系統(tǒng)來為決策提供信息的能力
。當前AI技術(shù)的發(fā)展為解決大數(shù)據(jù)挑戰(zhàn)提供了解決方案。深度神經(jīng)網(wǎng)絡(luò)非常適合解決大數(shù)據(jù)的各種潛在特征問題
,同時無需人工干預(yù)的自學習能力可以接管許多大數(shù)據(jù)處理任務(wù)
。將計算、存儲
、搜索
、統(tǒng)計、抽取
、生成內(nèi)容初樣等工作交給AI
,尤其是大模型技術(shù)發(fā)展迅速,機器開始聽得懂人話了
,涌現(xiàn)出多任務(wù)能力
,正在賦能各行各業(yè)
,生成式AI更是讓我們看到了AI的創(chuàng)造力。與人類認知一樣
,機器認識也需要在不斷的交互過程中
,逐步構(gòu)建、優(yōu)化豐富的神經(jīng)網(wǎng)絡(luò)
,才能進而涌現(xiàn)出更多的創(chuàng)新和創(chuàng)造能力
。人與機器在交互中,教學相長
,互相啟發(fā)
,各智其智,智智與共!
目前深度神經(jīng)網(wǎng)絡(luò)的復(fù)雜性使得AI運行對人類來說是不透明的
,存在被對手利用算法本身來傳播錯誤信息的隱患
。同時,由于不可信的數(shù)據(jù)和算法中的不正當激勵
,AI技術(shù)也很容易“學壞”
。所有這些因素,都要求人類必須參與到指揮控制過程中
,成為人工智能系統(tǒng)的監(jiān)督者
。
(1)指揮控制的智能化過程需要“人在回路”,人機結(jié)合
,提供任務(wù)驅(qū)動的目標界定區(qū)分和相稱性的準確評估能力(目前AI方法存在界定區(qū)分原則和相稱性原則挑戰(zhàn));
(2)多源數(shù)據(jù)融合
,需要在多個數(shù)據(jù)源之間進行數(shù)據(jù)比較與融合驗證(避免單一數(shù)據(jù)源問題帶來的“偏見”或被操控的隱患);
(3)人員培訓(xùn),先進的AI需要大數(shù)據(jù)
、大算力
,還需要熟練的技術(shù)人員作為支撐,尤其是業(yè)務(wù)系統(tǒng)分析師和操作人員需要接受AI系統(tǒng)及其應(yīng)用方面的大量培訓(xùn)
,需要增加對算法的了解
,以能夠最好地利用AI的潛力,發(fā)現(xiàn)故障
,避免AI“學壞”
。
(4)人機界面設(shè)計,提高智能決策的透明度
,讓人類可以有效檢測
、報警、提示
、判斷和建議
,對AI系統(tǒng)如何得出的結(jié)論有一定了解,對抗AI“黑盒子”的隱患
。
(三)科技推動+需求牽引的創(chuàng)新發(fā)展
指揮控制科學發(fā)展是科技推動+需求牽引
。海灣戰(zhàn)爭催生了以信息化為特征的世界性軍事變革
,今天AI技術(shù)的發(fā)展應(yīng)用,將催生以智能化為特征的新軍事變革
。新技術(shù)催生新裝備
,新裝備使用帶來作戰(zhàn)方式的改變,這些新的作戰(zhàn)方式和方法積累到一定程度
,進而引發(fā)理論的變革
,并最終導(dǎo)致組織結(jié)構(gòu)和體制機制的變革。近年來
,美軍陸續(xù)推出“空海一體戰(zhàn)”“網(wǎng)絡(luò)中心戰(zhàn)”“決策中心戰(zhàn)”“馬賽克戰(zhàn)”“分布式作戰(zhàn)”“聯(lián)合全域作戰(zhàn)”等一系列新型作戰(zhàn)概念
。今天,指揮控制所涉及的對象(人
、裝備
、設(shè)施、信息
、時空
、結(jié)構(gòu)等)都已經(jīng)發(fā)生或正在發(fā)生深刻的變化,戰(zhàn)爭形態(tài)不再局限于傳統(tǒng)的軍事沖突
,整個領(lǐng)域面臨著一場深刻的“范例轉(zhuǎn)移”式的大變革
。創(chuàng)新發(fā)展指揮控制理論、方法和技術(shù)
,解決C4ISR中多學科交叉研究的創(chuàng)新問題
,有效開發(fā)軍地信息資源,提高指揮控制的敏捷性